TL;DR: When a speed limiter (governor) clashes with cruise control or the engine ECU, both systems try to control torque at the same time. The ECU sees conflicting throttle and torque commands and goes into self-defense. You end up with cruise dropping out, limp mode, or a handful of new DTCs.
The proper fix is to track down CAN bus and torque request conflicts, update and reconfigure the governor, and align priorities or calibrations without defeating any factory safety systems.
Key Takeaways
- A speed limiter–cruise control conflict happens when both systems send overlapping or opposing torque or throttle commands into the ECU or CAN bus at the same time.
- Classic clues include: cruise control randomly shutting off, a check engine light immediately after governor install, intermittent limp mode, and RPM “hunting” right around the governed speed.
- Most interference issues trace back to CAN bus arbitration, reused or incorrect message IDs, poor integration with electronic throttle control (ETC) or a drive-by-wire system, or outdated governor firmware.
- Diagnosis should follow a structured process: pull and save DTCs, log CAN traffic, look at throttle sensor and torque request data, and verify governor–ECU compatibility against real documentation.
- Fixes usually involve tweaking CAN message priority, refining torque limit logic, updating firmware, or in some cases revising OEM ECU calibration rather than ripping out or defeating safety features.
- Pre-install compatibility checks and a disciplined, documented post-installation verification drive drastically cut the odds of ECU conflicts.
- Resolute Dynamics Control modules and similar devices should always be configured using a compatibility matrix and known CAN protocol match, not trial-and-error wiring or guessing at IDs.
- Recurring DTCs or limp mode should never be ignored; long-term ECU conflicts can hide real engine problems and can give dealers reason to push back on warranty claims.
Quick Definitions: What Is ECU Interference from a Speed Limiter?

What is speed limiter–cruise control ECU interference? It’s a condition where a speed limiter (governor) sends torque-reduction or throttle-limiting commands that clash with cruise control torque requests or OEM ECU torque strategies over the CAN bus.
The engine ECU receives mismatched inputs, sees something that does not make sense, and reacts by dropping cruise, cutting power, or logging fault codes to protect the powertrain.
How Speed Limiters and Cruise Control Can Conflict
Speed limiters and cruise control can get in each other’s way because both are trying to control vehicle speed through torque. On older cable-throttle setups, you might get away with clumsy add-ons. On a modern drive-by-wire system, not so much.
When the limiter says “cut torque” while cruise control says “give me more torque,” the ECU has to pick a winner. That tug-of-war is where problems start.
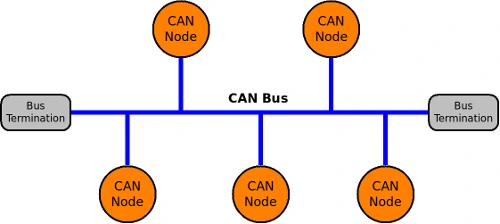
Most newer vehicles have an engine ECU, a cruise control module, and often a separate speed limiter/governor module, all talking over the same CAN bus. In a drive-by-wire system with electronic throttle control (ETC), nobody pulls a cable anymore. Everything is requests and limits:
- Torque requests like “I need 120 Nm to hold 100 km/h up this hill.”
- Torque limits like “don’t let this thing go past 80 km/h or 2000 rpm.”
Conflicts show up when a few things line up badly:
- Cruise control is commanding more torque to hold or build speed.
- The speed governor is simultaneously asking for torque reduction because the vehicle is near or above the governed speed.
- The engine ECU’s arbitration logic has to decide who it listens to. Many ECUs follow a “lowest allowable torque wins” strategy or a strict message priority structure. If the signals fight too hard, the ECU often drops into a safety mode.
On heavy-duty platforms using J1939 torque command, both cruise and the governor can end up manipulating the same torque control PIDs. If the add-on device isn’t mapped correctly, you get a straightforward CAN bus arbitration conflict or PID priority collision where the same parameter is being driven by two brains at once. The ECU is smart enough to know it doesn’t like that.
Once the ECU spots inconsistent throttle position, torque request, or speed feedback, it starts protecting itself and the driveline. That usually means:
- Shutting off cruise control with no user input. You hit “SET,” it holds for a bit, then drops.
- Falling into limp mode, limiting power until you cycle the key or fix the underlying problem.
- Logging a DTC (diagnostic trouble code) and lighting the check engine light, sometimes along with traction or ABS lights if other modules are involved.
The issue is rarely “bad ECU” or “bad governor” by themselves. It usually comes down to poor integration and badly managed priorities between subsystems that all think they’re in charge.
Throttle Authority Conflict in Practice
Take a simple example of a vehicle governed at 100 km/h:
- Cruise control torque request: 180 Nm to climb a mild grade and stay pinned at 100 km/h.
- Governor torque limit: 160 Nm once the tires see 100 km/h, to keep the truck from overshooting the limit.
- ECU arbitration method: “lowest allowed torque wins” to stay on the safe side.
In practice, you get a tug-of-war. Cruise keeps asking for more, the governor keeps trimming it back. The ECU follows the stricter limit and may try to satisfy both until it decides something is off.
That’s where you see RPM hunting at the governed speed, light surging, or cruise dropping completely because the ECU can’t deliver cruise’s request without violating the governor’s cap. To the driver it feels like the truck can’t make up its mind.
Common Symptoms of Speed Limiter–ECU Interference
Once a speed limiter starts fighting the ECU or cruise module, the truck usually tells on itself. The problem is most people don’t recognize the pattern and start chasing sensors or hardware that aren’t actually bad.
After you install or tweak a speed limiter or a Resolute Dynamics Control module or anything similar, watch closely for this kind of behavior:
- Cruise control not working with speed limiter enabled – Cruise won’t arm at all, only works below a certain road speed, or kicks out right as you creep up on the governed threshold. This often happens on long, flat freeway runs where everything should be stable.
- Cruise control resume failure – You hit “RES” and the truck starts to speed up, then instantly dumps cruise near the governor’s limit. The ECU sees a torque demand it can’t approve and just says no.
- Check engine light speed governor event – The MIL/SEL shows up for the first time right after the governor goes in or the limiter settings get changed. If the only thing that changed is the governor, that’s a big hint.
- Intermittent limp mode trigger – At highway speeds the rig suddenly feels gutless, tops out way lower than usual, and then returns to normal after a key cycle. That on–off pattern is textbook “ECU doesn’t like what it sees” behavior.
- Throttle response hesitation – Near the governed speed there’s a delay between pushing the pedal and the engine responding. That’s ETC getting overruled. The governor trims torque just as your foot asks for more.
- RPM hunting or speed surging – At or just below the limit speed, RPM or vehicle speed oscillates. You’ll feel light surging or constant small corrections. Those are competing torque commands taking turns.
- DTC codes after governor install – New diagnostic trouble codes that mention throttle position, torque request mismatch, CAN bus, or cruise control faults show up when everything was clean just days before.
Typical DTC fault codes for speed governor conflicts often fall into a few families:
- P0121 / P0122 / P0123 – Throttle position sensor range or performance issues. The ECU sees a mismatch between commanded and actual throttle or an implausible relationship between pedal and plate.
- P0600–P0606 – Control module communication or internal module errors. These can pop when CAN traffic is noisy, IDs collide, or watchdog timers keep getting tripped by strange message patterns.
- P2100–P2138 – Electronic throttle control / drive-by-wire faults. These show up when ETC commands and measured throttle plate position don’t line up for long enough to bother the ECU.
- U-codes (e.g., U0100, U0121) – CAN communication issues between the ECU, ABS, and other modules. These often point toward signal bus contention or a chatty aftermarket device drowning out OEM messages.
This guide is focused on ECU and cruise conflicts. If your problem is that the limiter never engages, never holds speed, or feels totally dead, that’s a different diagnostic tree. Use this separate guide for that:
diagnostic questions.
Diagnosing the Conflict (Step-by-Step)
Guessing at wiring or changing IDs blindly is how people get in trouble. A structured process saves you time and protects both the truck and your warranty position. You want to prove what’s happening, not just hope you got lucky.
The core steps are simple on paper: scan for DTCs, look at CAN traffic, verify what the throttle and torque signals are doing, check governor firmware, and confirm the OEM ECU calibration is something the governor is actually designed to work with.
Step 1 — Scan DTCs

Always start by asking the truck what it’s mad about. That means a full DTC scan with an OBD-II scanner or, ideally, an OEM-level diagnostic tool if you can get your hands on one.
Actions:
- Hook up a scan tool and run a global scan. Don’t limit yourself to the engine. Pull codes from engine ECU, ABS/ESP, body control, and any dedicated cruise modules the tool can see.
- Write down or save all present, pending, and stored codes before you hit any “clear” button. Screenshots or PDF exports are cheap insurance.
- Track mileage or timestamps around each code if the tool offers that. Pay close attention to events that began right after the governor install or configuration change.
What you’re looking for:
- Codes that hint at a throttle position sensor conflict or ETC weirdness, especially those that line up with times you used cruise at highway speeds.
- Communication related U-codes that hint at CAN bus arbitration trouble, message timeouts, or chatter between modules.
- DTCs that only show up when you’re near the governed speed. For example, faults that don’t appear until you hit 95–105 km/h with cruise on.
Hidden expert tip: Never clear codes before you save a complete report. That history is gold for you, your fleet manager, the installer, or the governor manufacturer, and can matter a lot if a dealer questions the install or warranty.
Step 2 — CAN Bus Traffic Analysis
If the codes point toward communication issues or torque mismatches, you need to look at what the CAN bus is actually carrying. That’s where people either get answers or guess themselves into a corner.
Tools required:
- A CAN bus logger or analyzer. This can be a portable logger, a laptop with the right interface, or in some cases an OEM tool with datalogging.
- Clean access to the CAN wiring. You want to tap in a way that doesn’t damage insulation, introduce reflections, or mess with termination.
Key parameters to inspect:
- Governor message ID (hex) – The CAN ID the speed limiter or Resolute Dynamics Control module is using to talk. If it’s not documented, that’s your first red flag.
- Cruise control message ID (hex) – IDs the cruise module uses to send vehicle speed, setpoint, and torque requests to the ECU.
- Priority determination – On CAN, the lower the numeric ID, the higher the priority. You need to know which IDs are actually winning when two nodes talk at the same time.
- Message collision rate – Watch how often torque-related messages line up or step on each other during steady cruise near the governed speed.
If there’s CAN bus arbitration conflict, the logger will usually show it loud and clear:
- Retry bursts or error frames whenever cruise and the governor both send torque messages at roughly the same instant.
- Uneven or jittery update intervals for critical PIDs like vehicle speed or demanded torque.
- A textbook PID priority collision where two different nodes are trying to publish or override the same parameter.
Fix direction hint: If you see trouble at the bus level, you’re not going to fix it by changing the speed setting alone. You’re likely looking at changing the governor’s CAN ID, filtering or remapping its messages, or even moving it to another CAN segment like engine CAN instead of body CAN so it can observe without stepping on messages it shouldn’t touch.
Step 3 — Governor Firmware Check
Once you have a handle on how the traffic looks, you need to see what brain the governor itself is running. Many “mystery” cruise issues turn out to be old firmware talking a slightly different language than the ECU.
Actions:
- Connect to the speed limiter or Resolute Dynamics Control module using the manufacturer’s configuration or service software.
- Read out the firmware version requirement and the actual firmware it’s running. Write both down.
- Compare your version against the manufacturer’s release notes or compatibility matrix for your exact engine family, year, and ECU.
Issues to watch for:
- Outdated firmware that predates the ECU’s current CAN protocol or the latest OEM ECU calibration. Dealers update ECUs all the time. If the governor hasn’t kept up, conflicts are almost guaranteed.
- Firmware that interprets J1939 torque command differently than your ECU expects, like wrong scaling, signed vs unsigned issues, or incorrect update rates.
- Missing or incomplete cruise integration options. For example, firmware that only knows how to hard-limit torque and has no mode to respect cruise behavior.
In practice, a clean firmware update fixes odd quirks like resume not working right, cruise randomly dropping, or ETC faults that only appear at the limit. The updated code usually has better logic for how it backs down torque without fighting the ECU.
Step 4 — ECU Compatibility Review
If firmware is up to date and CAN traffic looks clean enough, you have to ask a more basic question: Should this governor be on this ECU at all? A lot of “almost compatible” installs work just well enough to be confusing.
Governor–ECU compatibility hangs on a few things:
- Compatibility check method: You want a clear match between the ECU’s protocol (J1939, ISO 15765-4, OEM proprietary) and the governor’s supported protocol and message set. Guessing isn’t good enough.
- OEM calibration impact: Dealers and OEMs roll out new calibrations that can change torque arbitration or cruise logic. A calibration that didn’t exist when the governor was tested might need new support from the governor manufacturer.
- Pre-install verification: A proper Resolute compatibility matrix or similar document that shows your specific ECU part number and calibration ID as tested and supported.
It’s also worth finding out if the ECU has had a software update recently. A truck that ran perfectly with a governor for years can start misbehaving right after a dealer visit if the OEM ECU calibration changed how torque requests are handled.
Important safety note: Don’t try to hack the ECU yourself, and don’t start disabling factory protections. If a new calibration is required to work cleanly with the governor, that should come from OEM-supported channels, not from some “tuned” file off the internet.
How to Resolve Each Interference Type
Not all interference looks the same, and you don’t solve all of it the same way. Once you know whether the problem is torque arbitration, CAN bus conflict, firmware behavior, or ECU calibration, you can pick the right fix instead of just cranking the speed setpoint down and hoping.
In every case, configuration and proper integration are the first tools you reach for. Disabling limp mode or ETC protections just to “get cruise back” is asking for bigger trouble later.
1. Throttle Authority / Torque Request Conflicts
When cruise and the governor both think they should be commanding torque on a drive-by-wire system, you see oscillation, lag, and sometimes limp mode right around the governed speed. The ECU is trying to hold the line while two bosses yell at it.
Resolution methods:
- Adjust torque limit strategy: Set the governor to roll torque down smoothly as you approach the limit instead of slamming a hard cut. A gradual ramp lets the ECU and cruise settle into a stable point instead of bouncing off a brick wall.
- Reprioritize signals: Wherever the platform supports it, configure things so the engine ECU always has the final say and the governor only sets upper bounds. The governor should avoid trying to micromanage the throttle plate itself on modern ETC systems.
- Integrate cruise behavior: Many governors include specific “cruise integration” modes. Instead of fighting cruise torque, they tweak or cap the allowable cruise setpoint so the truck never tries to maintain an illegal speed in the first place.
A simple example: Rather than letting the driver set cruise at 110 km/h on a truck governed to 100 km/h and then fighting to hold 100 while cruise keeps asking for 110, configure the governor so you can’t set cruise higher than 100. You remove the core conflict instead of trying to outsmart it with torque cuts.
2. CAN Bus Arbitration and Message ID Conflicts
If the CAN bus arbitration conflict shows up in your logs, you have to fix the plumbing before you worry about fine-tuning behavior. Two modules fighting using the same or overlapping IDs will never behave cleanly no matter how carefully you set the speed limit.
Fix methods:
- ID reassignment: Change the governor’s CAN message ID (hex) when it collides with an OEM ID or uses an ID range the ECU expects to own. The correct IDs should always be documented by the governor manufacturer.
- Message filtering: Configure the governor so it only transmits torque-related messages on channels it’s designed to manage. Everywhere else it should behave as a listener, not as a second master trying to overwrite OEM commands.
- Tap point relocation: Move the device to the correct CAN segment as defined by the install manual. For example, if it’s supposed to live on engine CAN, don’t piggyback it on body CAN just because that connector was closer.
Once you cut down the message collision rate and get IDs in their proper lanes, cruise usually settles down. U-codes clear up, random watchdog resets stop, and CAN error counters stay low during highway runs.
3. Firmware Incompatibility or Bugs
Sometimes everything about wiring and IDs looks right, but certain model years or ECU versions still act up. That’s often a sign that the firmware just doesn’t fully understand every quirk of that ECU yet.
Resolution steps:
- Flash the latest approved firmware onto your speed limiter or Resolute Dynamics Control module. Follow the update instructions exactly so you don’t brick it.
- Confirm the firmware release notes or support docs state explicit support for your engine model, vehicle platform, and ECU part number.
- Go back through governor parameters afterward. Re-enter speed limits, torque caps, cruise integration options, and anything else that might have reset or changed.
Better firmware tends to smooth out weird intermittent behavior, such as a watchdog timer reset when CAN traffic is heavy or brief ETC glitches the old code didn’t handle gracefully.
4. ECU Calibration Mismatch
Every once in a while, you do everything right on the governor side and still get conflicts. That’s usually when the OEM ECU calibration itself changes the rules.
When to suspect this:
- The issues started immediately after a dealer visit where the ECU was reflashed. You haven’t touched the governor since.
- Other otherwise identical vehicles that haven’t had the update don’t show the same symptoms with the same governor hardware and configuration.
Resolution path:
- Pull and document the ECU software version and calibration ID using an OEM tool or a scan tool that can read those fields.
- Share that information, along with DTC reports and any CAN logs, with both the vehicle OEM and the governor manufacturer’s technical support.
- Use a compatibility matrix from the governor manufacturer (Resolute and others publish these) to check whether that combo has been validated or if new firmware or a different calibration is required.
If the answer is a new or revised ECU calibration, it should always come from official OEM channels. Rolling an ECU back to an old file or using an unapproved tune is a fast way to run into emissions trouble and give the OEM a reason to walk away from warranty obligations.
5. DTC Fault Codes: Clearing and Recurrence Prevention
Once you’ve made the changes you need, you still have to clean up the ECU’s memory and prove the issue is actually gone. Leaving old faults sitting there just makes future diagnostics harder and scares drivers and inspectors.
Steps:
- Use an OBD-II reset function or an OEM-level tool to clear every fault related to throttle, ETC, torque arbitration, or CAN communication that you tied to the governor conflict.
- Carry out a controlled test drive where you intentionally hit the conditions that used to trigger the codes. That usually means a stretch of highway where you can sit just under and just over the governed speed.
- Scan the truck again immediately after the drive. Make sure the same DTCs haven’t quietly returned as pending or stored faults.
Recurrence prevention:
- Keep the firmware at or above the minimum version requirement listed in the governor’s compatibility matrix for your exact ECU.
- Document the final configuration, including speed setpoints, integration flags, CAN IDs, and wiring notes. Use that to keep a whole fleet consistent instead of reinventing the wheel on every unit.
If the same codes keep popping back, stop and escalate. Gather CAN logs, configuration files, and DTC history and go straight to the governor manufacturer’s technical team. Repeatedly clearing codes without solving the conflict just covers up real issues and trains people to ignore warning lights.
Preventing ECU Conflicts During Speed Limiter Installation
Preventing trouble is always easier than untangling it after a driver has been stranded in limp mode on the freeway. A little discipline during install goes a long way, especially on mixed fleets where trucks don’t all share the same ECU and calibration.
The main pillars are simple: check compatibility before you plug anything in, tie into the CAN bus where the manual says, set parameters carefully, and finish with a proper test drive instead of assuming “no lights on the dash” means you’re done.
Pre-Installation ECU Compatibility Check
Before you fit any speed limiter or Resolute Dynamics Control module, take a few minutes to confirm you’re not mixing hardware and ECUs that were never meant to talk.
- CAN protocol match: Make sure the governor is built for the same protocol and message set your ECU uses, whether that’s J1939, ISO-based OBD formats, or an OEM proprietary setup. If the documentation is vague, stop and get a clear answer.
- ECU model and calibration: Cross-check ECU part numbers and calibration IDs against the governor-ECU compatibility matrix from the manufacturer. Don’t assume a later year of the same truck is identical under the hood.
- OEM restrictions or approvals: Some fleets, leasing outfits, or regional regulations only accept OEM-approved devices or dealer-installed limiters. Respect those rules or be ready for warranty and compliance headaches later.
This sort of pre-install verification needs to be standard practice, not a “nice-to-have.” Skipping it is one of the main reasons people end up with cruise issues and lingering DTCs right after an install.
Correct CAN Bus Tap Point Selection
Where you tie into the CAN bus matters more than most people think. Engine CAN, chassis CAN, and body CAN might all use the same physical wires and connectors style, but the content and expectations on each segment are different.
- Follow the wiring diagram exactly. If it calls for engine CAN under the dash or at the ECU, don’t decide that the body CAN behind some trim panel is “close enough.”
- Minimize stacking multiple aftermarket devices on one long CAN stub. Too many devices hanging off one spot can cause reflections and timing issues.
- Preserve proper termination and twisted-pair wiring practices so signal quality stays in spec. Random splices and long unshielded runs are a common cause of signal bus contention complaints.
If you’re combining a speed limiter with other add-ons like telematics, tracking, or dash cameras that also tie into CAN, it’s smart to schedule a post-installation audit to make sure the total bus load and arbitration are still healthy:
post-installation audit.
Governor Parameter Configuration Before Activation
Configuring the governor before you turn it loose on live traffic avoids most “mystery” complaints. A lot of the surging and cruise dropouts I see come from lazy default settings that were never tweaked for that particular truck or use case.
Key parameters:
- Maximum vehicle speed and hysteresis band. Give the system a small window so it doesn’t hunt right on the edge of the governed speed. A bit of hysteresis keeps it from constantly bouncing in and out of limit mode.
- Torque limiting behavior. Decide whether you want a hard fuel cut, a soft ramp-down, or cruise setpoint adjustment. Hard cuts are rough and more likely to upset ETC and traction systems.
- Cruise integration options. Activate features like “block cruise setpoints above governed limit” or “smoothly trim cruise command near the limit” instead of letting cruise and the governor fight it out.
Keep in mind, this guide is about identifying and fixing interference, not doing full calibrations. For deep-dive tuning, especially across a whole fleet, use this resource:
calibration after fix.
Post-Installation Verification Drive
Every install should end with a structured post-installation verification drive. Skipping this is how you hand a driver a problem that could have been caught in 20 minutes.
Recommended test profile:
- Test duration: 20–30 minutes minimum so the ECU has time to see real-world conditions.
- Speed range covered: Low-speed maneuvering, mid-range cruising, and several minutes operating at or just below the governed speed, for example 80–110 km/h as applicable.
- Cruise control test: Engage and disengage cruise several times. Use “set,” “resume,” and manual throttle override while you’re near the governed speed to be sure everything behaves logically.
- DTC check post-drive: Run a full scan the moment you’re back. This is mandatory. Some codes won’t light a MIL right away but will still be stored.
- Sign-off requirement: A trained technician signs off that there’s no abnormal behavior, no new DTCs, and that ETC and torque response are stable at all tested speeds.
That verification drive and sign-off sheet protect everyone involved: the installer, the fleet owner, and the driver who has to trust the system at highway speeds.
Common Mistakes (and How to Avoid Them)
- Mistake 1: Assuming cruise issues are purely mechanical.
In the old cable and vacuum-servo days, mechanical problems topped the list. On modern rigs, failing to consider electronic causes like ETC logic, CAN messages, and torque arbitration is a big miss.
Fix: Start every diagnostic session with a DTC scan and at least some data logging. Treat electrical and software causes as the default on drive-by-wire vehicles, not the last thing you check. - Mistake 2: Ignoring new DTCs after governor install.
A lot of techs shrug off new codes as “just the limiter doing its job” and clear them. That’s how subtle conflicts grow into bigger problems.
Fix: Treat any new throttle, torque, or CAN communication DTC that appears right after the install as a warning. Track down and resolve the cause before the vehicle goes back into daily service. - Mistake 3: Randomly changing CAN wiring or IDs.
Guessing at IDs or splicing into whatever CAN wires are handy often creates intermittent, hard-to-repeat problems that waste everyone’s time.
Fix: Use the manufacturer’s published wiring diagrams and ID assignments. Validate changes with a CAN trace and a compatibility matrix instead of twisting wires together and hoping. - Mistake 4: Disabling safety features to “get cruise back.”
Turning off ETC protections, traction control, or limp strategies just to keep cruise working is tempting under pressure, but it leaves the truck exposed.
Fix: Leave safety functions in place. Fix the integration so the ECU is happy again rather than forcing it to ignore real inconsistencies. - Mistake 5: Skipping post-install test drives.
Bolting the hardware on and handing off the keys without a proper test is like finishing an engine rebuild and never starting it in the shop. You’re just pushing the risk onto the driver.
Fix: Build a verification drive with clear criteria and technician sign-off into your standard operating procedure for every governor or Resolute Dynamics Control module install. - Mistake 6: Mixing ECU interference with unrelated RPM issues.
Problems involving manual-gear RPM regulators, PTO/RPM controllers, or stationary speed controls belong to a different family of issues than cruise/ECU interference.
Fix: If your complaint is about PTO speed holding or manual RPM regulation, work off a focused guide:
RPM regulator issues instead of using this ECU/cruise conflict guide.
FAQ
This FAQ sticks to speed limiter–cruise control–ECU interactions. For broader topics like general engagement failures or full calibration procedures, follow the linked specialized guides.
1. Will a speed limiter that interferes with cruise control void my warranty?
That depends heavily on local law and the OEM’s policies. What you can expect is this: if the governor causes ECU errors, limp mode, or DTCs tied directly to engine or emissions functions, the manufacturer may refuse to cover those specific repairs. They usually have to show a link between the modification and the failure. Your best move is to use approved hardware, follow a documented compatibility matrix, keep installation records, and hold on to test-drive and DTC reports.
2. Do I need OEM approval before installing a speed governor?
Many fleets run governors without formal OEM sign-off, especially where speed limitation is a company policy issue. Some OEMs, leasing firms, or regulatory setups do insist on OEM-approved devices or dealer-installed solutions. Read the fine print in your warranty and fleet policy. Using a device and parameters that the OEM recognizes, or that appear in a proper compatibility matrix, gives you the strongest position if anything ever comes into question.
3. After fixing the interference, how do I re-enable cruise control?
Once you’ve sorted out CAN conflicts and torque arbitration, cruise usually comes back on its own. If it still won’t engage, double-check for any stored or pending DTCs and clear them. Verify that cruise is still enabled in the ECU’s configuration and that no lockouts are active. On some platforms, you’ll need a dealer-level tool to reset certain fault counters or re-learn cruise inputs after serious ETC or communication errors.
4. Will I need an ECU reflash to solve the conflict?
Most of the time, no. You can resolve a lot of interference by updating the governor firmware, fixing IDs, and tightening up integration logic. You only get into ECU reflashes when an OEM calibration change on the truck side introduced a new behavior the governor wasn’t designed around. If it comes to that, stick to OEM-supported updates. Unofficial reflashes or tunes can put you on the wrong side of emissions rules and can make warranty conversations a lot harder.
5. How should I report persistent conflicts to the governor manufacturer?
Don’t just say “cruise doesn’t work.” Give them something they can engineer from. Gather a full list of DTCs, ECU part numbers and calibration IDs, governor model and firmware version, and a CAN log that covers a few minutes at governed speed with cruise engaged. Include photos or diagrams of how and where you tied into the CAN bus. That kind of detail lets support teams spot compatibility gaps or firmware issues quickly instead of guessing over email.
6. Can a speed limiter affect engine management beyond cruise control?
Yes. A governor that keeps sending conflicting torque or throttle commands can indirectly change how the ECU manages fuel, boost, knock control, and even charging load because all of those strategies respond to torque demand and engine load. If the ECU keeps seeing conditions that look abnormal, it can lean on protective maps, which shows up as reduced power, odd drivability, or poor fuel economy even when you aren’t at the governed speed.
7. Why does my vehicle go into limp mode only at highway speeds after the governor install?
Highway speeds are exactly where cruise and the governor overlap the most. The ECU sees constant medium-to-high torque requests from cruise at the same time the limiter is trying to trim torque back. If the ECU spends too long in that conflict zone, or it keeps seeing requests that violate its internal limits, it may drop into limp mode to protect the gearbox and engine. That pattern usually points straight to a torque request override or arbitration problem right near the governed speed.
8. Where can I find advanced calibration guidance once interference is fixed?
Once you’re confident the governor, ECU, and cruise are all living together peacefully, you can refine things across a fleet. For deeper, step-by-step calibration and reset procedures beyond this interference-focused guide, use:
calibration after fix. That resource walks through technician-level adjustments, fleet templates, and reset strategies.
Final Summary and Next Steps
Speed limiter, cruise control, and ECU conflicts nearly always come back to one thing: how multiple control modules share throttle and torque authority over the CAN bus. When a governor’s torque limits cut across cruise control’s demands or clash with OEM calibration strategies, the ECU reacts the only way it knows how. It drops cruise, cuts power, throws DTCs, or all three.
The right way to fix it is to:
- Work through a proper diagnosis: full DTC scan, CAN traffic review, governor firmware and configuration check, and a hard look at ECU–governor compatibility.
- Apply targeted solutions: straighten out priorities, update firmware, refine integration parameters, and only involve ECU calibration changes when the OEM is on board.
- Stop future interference before it starts with solid pre-install checks and disciplined post-installation verification drives, documented every time.
If you’re already seeing symptoms and you’re not sure whether the governor is even functioning properly on its own, start by answering the structured
diagnostic questions, then use the ECU-focused steps in this guide to chase down conflicts. Once everything behaves cleanly, use the dedicated calibration guide to dial in settings across the rest of your fleet.
Handled correctly, a speed limiter can sit on the same CAN bus as cruise control and modern engine management without any drama, giving you safety and compliance while keeping drivability where it should be.
Step-by-Step Overview: Diagnosing Speed Limiter–Cruise–ECU Conflicts
- Scan and save all DTCs using an OBD-II or OEM diagnostic tool before you clear anything.
- Log CAN bus traffic during a test drive while operating near the governed speed with cruise engaged.
- Review throttle, pedal, and torque request signals to spot inconsistencies or tug-of-war behavior.
- Check the governor firmware version, compare it with the manufacturer’s requirements, and update if needed.
- Verify compatibility for your exact ECU calibration using the manufacturer’s matrix and documentation.
- Adjust CAN IDs, message priorities, tap points, or integration parameters wherever conflicts show up.
- Clear DTCs, perform a structured verification drive, then rescan and confirm cruise and limiter operation are stable.
For a more detailed post-install review and documentation checklist, see:
post-installation audit.
Related reading: How the ECU Powers Speed Limiting and Replacing a Faulty Governor.

The Resolute Dynamics team designs and manufactures speed limiters (SLD), GPS tracking, and automotive safety systems used on 200,000+ vehicles across 20+ countries. We write about fleet compliance, road-safety regulation, and vehicle-safety technology, including Malaysia’s JPJ SLD mandate, UAE RTA rules, and global standards like UN R89, to help fleet operators and transport businesses stay safe and compliant.